Now that we know the potentialities of PNN-E let’s make a jump in the future and have a look at a PNN spaceship.
During the days of SC23/a, ASPS released a sketch of their idea of starship:
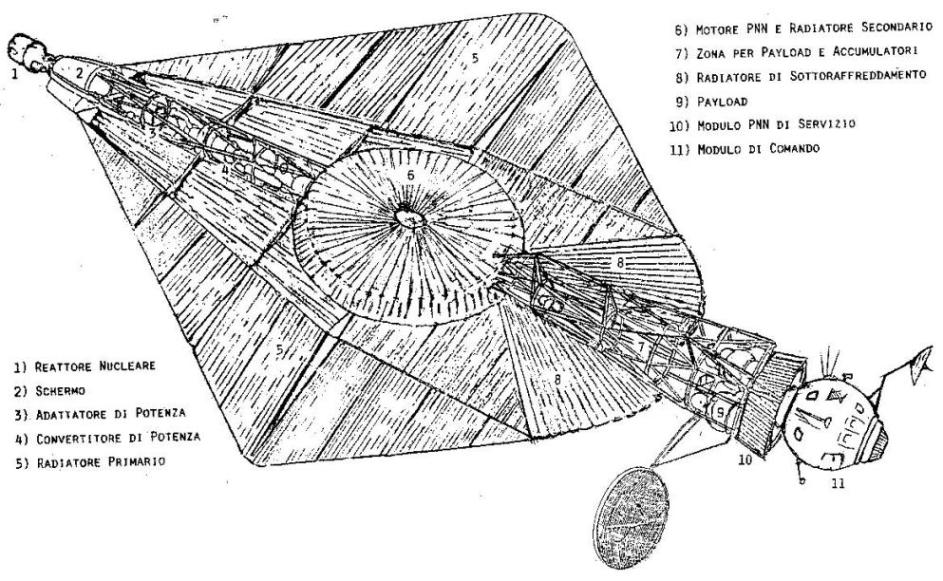
This is the translation from Italian of all its components:
- Nuclear reactor
- Shield
- Power adapter
- Power converter
- Primary radiator
- PNN engine and secondary radiator
- Accumulators and Payload area
- Subcooling radiator
- Payload
- PNN Service module
- Command Module
However during the development of PNN-E the researchers at ASPS discovered the full potential of their engine, so they reinvented the whole project creating something completely different from the standards (and cliches) of modern astronautics.
The spaceship structure
Forget everything you’ve learned from sci-fi movies. The directors have just transposed the design of a sea ship in the space: in reality if such ship accelerates, the crew would fall toward the stern. This is because the vector of the acceleration force is perpendicular to the crew vertical. Yes, maybe some centuries from now our descendants will invent inertial dampers and manipulate gravity, but at present days such design is a failure for space travel.
A PNN ship instead, is basically an hollow cylinder. To make things simpler, let’s imagine this “cylinder” parked on a landing pad, in vertical position. The floors are the various decks, where the central floor is the bridge (we’ll discuss later the reason of this position); a central elevator connects all decks to facilitate the movement of crew and materials.
The ground floor is the best choice for the airlock, to facilitate boarding and landing on a planetary surface. First floor can be fitted to contain engine room, in our case power adapters and converters, and the energy source. The bridge must have vision of what happens around the ship, thus it must be fitted with sentry-boxes that bulges from the external hull (like the brakemen sentry-boxes in old steam engines) or similar arrangements. At least one deck must be shielded from gamma rays and E.M waves, so it can provide shelter to the astronauts in case of solar flares or other dangerous events.
About the engine positioning: ASPS wrote those specs at a time when Laureti was speculating of PNN-E tiles, but Tds VF2 seems to use a different concept (disc capacitors). Until further clarification let’s remain loyal to their first specification: the whole hull is the engine, because its surface is covered of thousands of PNN tiles.
Apart from those basic requirements, the ship doesn’t require any particular aerodynamic structure because the traversal of the atmosphere is relatively short, so the external hull can be designed to fit any other need.
Take off, artificial gravity and inversion
In order to take off and reach the orbit, our PNN engine must provide at least 1,1g of thrust to the whole structure. In this phase the generator is stressed, so a set of capacitors can help the energy source by discharging themselves and providing extra power.
Once in flight (the cylinder maintains the vertical position), the ship comfortably accelerates at 1g, leaving the atmosphere and then the orbit. As long as the ship accelerate, the astronauts experiment an artificial gravity. This is because in this configuration the vector of the acceleration force is perpendicular to the astronauts feet. With this flight attitude, to see the destination they have to look above their heads. In this phase you can think the ship like an ascending elevator, where the destination is the last floor.
Once the ship has arrived to its destination it can’t just brake at the last moment, because the sudden deceleration would destroy the ship (and the crew). The procedure will be something similar to this:
- the ship keep accelerating until half-way from the destination
- the crew members are alerted of the imminent inversion: they start to secure themselves and the materials for the incoming zero-g maneuver
- the thruster is switched off (therefore there is no acceleration force to “simulate” the gravity), then the ship rotates of 180°.
- the thruster is switched back on: now is decelerating the ship at 1g.
- The ship will be at full stop nearby the destination.
This simple scheme may help to better understand the maneuver:

Please notice that during deceleration phase the acceleration vector is always directed toward the astronauts feet but now the bow of the ship is facing at the opposite direction of the destination. With this new attitude to see the destination the astronauts have to look below their feet. In this phase you can think the ship as a descending elevator, where the ground floor is the destination.
This change of flight attitude is the reason to place the bridge on the middle section of the ship: this way, the crew can have visibility in both bow and stern and so have visual control in both flight attitudes.
Ship positioning, route setting and flight corrections
Now that we can wander across the solar system, we need a system to determine the position of the ship in the three dimensions. There are two possible solutions:
- Inertial position fixing
- Optical position fixing
Using the inertial position fixing, the ship is equipped with a set of gyroscopes that can trace any variation of speed and direction. Their data are then sent to the navigation computer. Unfortunately the precision tends to decrease during the time so the coordinates must be corrected at regular intervals with the help of other systems like, as example, a radar that can measure the distance from a solid body. This device can be used to measure the distance from three known planetary bodies and then triangulate the actual position of the ship.
The optical position fixing instead is what has been used since the dawn of manned spaceflight. It is quite similar to a sextant: an optical device measures the angular position of a body relatively to a reference-point in known position (i.e Earth or Sun), then the procedure is repeated for other two bodies. This procedure, including the recognition and tracking of the bodies, with the modern technology can be totally automatic.
Once that we know our position in space, we can set a route toward our destination.
As PNN-E can provide continuous thrust, the route will be way more easier and shorter than those of the conventional astronautics: there is no need to spare fuel, and no need for gravitational slingshots . In good approximation the route will be a straight line. The inversion point is at about half way from destination.
A bit more complex is the route correction. Let’s imagine that our ship has been accelerating for ten days, reaching an enormous speed, and then we need to correct our route. Unfortunately we can’t just roll the ship and turn like any sci-fi movie, because this would kill the crew and eventually destroy the ship. Instead we have to set a lateral thrust and slowly correct the route. When the lateral force appears, it will modify the main thrust vector, thus changing the orientation of the artificial gravity, with dangers for crew and structure. So we must orientate the ship according to the new resultant acceleration vector. If the new vector is 45° from the original, the ship must rotate by 45° and so on. This problem peaks at inversion point, when the speed is at its maximum, in the final phase of flight, once the ship has decelerated, the lower speed allows easier route corrections. The key to avoid this problem is the precision of the route.
With constant acceleration of PNN the journey duration is not directly proportional to the distance: for example at its farther point Mars is from our planet 230 times Earth-Moon distance. But to reach the planet It doesn’t take 230x time but about 16x. This is because the farther is the destination, more speed the ship can gain before the inversion.
Mission times
Even if the space is void, there are still a lot of atoms and small particles adrift in the cosmos. The impact of a single atom is not a problem even at high speeds but a few micron particle can start to pose a threat to the hull integrity. The ship must then be shielded both bow and stern (because in deceleration phase the stern is the new bow). A duralumin shield can absorb most of the smaller impacts but to increase safety there must be different layer of shielding. Moreover, the cylinder shape offers a small profile to impacts during navigation. Even with these solutions, the speed of the ship should be limited to 300 Km/s, that, compared with 14Km/s of conventional astronautics, is enough to reach Pluto in 1.5 year, unlike the 10/15 years required by nowadays probes. To reach higher speeds however, there is the need of a new technology: apart the Star Trek energy shields, the most realistic active protection against bigger impacts is a laser system. This laser can track and disintegrate the dangerous debris before they impact with the hull. Surprisingly enough a similar technology already exists, it just need to be adapted for this purpose.
Once the ship is equipped with active and passive shielding systems the PNN can be used at its maximum capabilities: Pluto would be reached in 18 days and 16 hours. Maximum speed at inversion: 7,122 Km/s, that is 2.37% of the speed of light!
Original article (in Italian)

Buongiorno, l’antigravita’ e’ possibile ovviamente solo dove c’e’ una forza di gravita’. La PNN non sfrutta l’antigravita’, altrimenti sarebbe limitata alla zona di gravita’ del pianeta e sarebbe inutile per i viaggi spaziali.
LikeLike
Buongiorno Valerio, è vero quello che dice. Nel post infatti parlo di gravità artificiale, intesa come l’illusione della gravità data dalla costante accelerazione dell’astronave ad 1g. Nel momento in cui l’accelerazione cessa, come nella manovra di inversione, non essendoci più una spinta verso il basso a 9.81 m/s2 l’intera astronave e tutto ciò che contiene torna ad essere priva di peso.
LikeLike
Si sono due cose diverse la gravita’ artificiale e l’antigravita’. Ho scritto cosi’ perche’ ci sono soggetti che credono che la pnn e’ antigravita’ e per questo motivo sono scettici. Tuttavia, basta capire bene cosa e’ cosa 🙂
LikeLike
Ha fatto bene a metterlo in chiaro 🙂
LikeLiked by 1 person
Ho trovato uno strumento utile per pianificare le missioni spaziali:
http://sourceforge.net/projects/emtg/
Variable Specific Impulse Trajectory to Uranus with Radioisotope Electric Propulsion

LikeLike
Strumentino interessante.. ricapitolando il laser ce l’abbiamo, il computer di navigazione pure.. adesso manca solo il motore 🙂
LikeLike
Come dice la descrizione e’ uno strumento medium-fidelity. Tempo addietro mi sono informato, un computer di sviluppo per il sistema di navigazione non costa poco 🙂
LikeLike
Non faccio fatica a crederlo.. sono strumenti con poca domanda, penso li comprerà la NASA e pochi altri.
Inoltre il software di navigazione dovrebbe essere scritto da zero, non credo sia mai esistita l’esigenza di gestire la navigazione interplanetaria direttamente a bordo 😉
LikeLike