In the first phase of research by ASPS, approximately during 80’s of the last century, the Association tried to work around the Third Law of Motion by using mechanical devices. The idea was to create a delay between an action force and its reaction force in an enclosed system: during said delay, a movement in space should be observed.
To better understand the concept let’s image a device in the space void. This device is composed by a chamber where a jackhammer hits cyclically a metallic rod. For the moment, let’s pretend there is an arrangement that, for each cycle, can produce a delay between the action/reaction forces that are generated when the hammer hits the rod.
The behavior of one cycle of the system will be the sequent:
- The jackhammer hits the rod
- An action force is generated, pushing forward the device
- Normally, according to Newton’s Law, the generated reaction force pushes backwards the device, setting to zero the resultant of the forces and thus preventing the device from moving
- In our case, the reaction force is delayed of n seconds. During this delay the action force is more than zero, so the device moves in the direction of the applied force for said n seconds
- After that time, the delayed reaction force intervenes in the opposite direction, stopping the device
- But meanwhile, the system has moved through the space!
ASPS created different prototypes to investigate the feasibility of this idea. The first one was the “Klingon”, so called because its resemblance with the ships of Star Trek. This device was the prototype of the hammer/rod system.
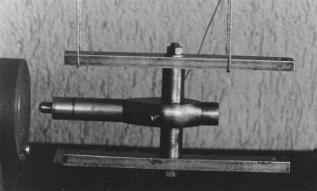
Figure 1: the Klingon in parallel configuration

Figure 2: the Klingon in perpendicular configuration
As you can see in Figure 1 and 2, the hammer has two wings that can be rotated parallel or perpendicular to the body. When the mass hits the rod the impact waves propagates more slowly when the wings are perpendicular, because the propagation will be transversal.
In figure 3 you can see the different behavior of the two configurations: on X axis is reported the impact speed, on Y axis the response time. The perpendicular configuration allows higher response time.

Figure 3: Force propagation in both configurations
After a long series of experiments, ASPS built a device capable of delaying the propagation of the recoil and thus the application of the reaction force. This device has been called Spazio Cosmico 23 alfa, or SC23/a. The price for the technical solutions of the prototype was challenging for the Association, so they had to partially pay it and partially bartering it, i.e. by writing software for CNC Milling machines. The mechanism inside SC23/a is capable to vary the configuration of the internal masses in order to replicate and improve what has been discovered with the Klingon prototype.

Figure 4: the SC23/a prototype
Figure 4 shows the device. For a detailed description you can visit this page (in Italian). Here in figure 5 is the graphic showing the phase displacement between action and reaction forces.
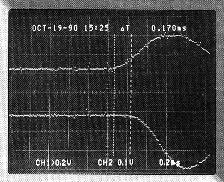
Figure 5: the delay of action and reaction forces in SC23/a prototype
Unfortunately ASPS has discovered that, as mechanical system, SC23/a does not comply with Superposition principle, hence it was unusable as practical thruster. This is why they’ve decided to move on and search for different roads.
Somehow, in early 90’s, the Association find a way to replicate the principle behind SC23/a in the electromagnetic domain. It’s not clear how they’ve decided this paradigm change, I suppose they’ve used the principle itself as a “guide” to find more suitable systems.
This is where things are getting interesting, leading us to Electromagnetic Non Newtonian Propulsion (or PNN-E) and the SC23 prototype…
